HOME | satellite telemetry | acoustic telemetry | geolocators | radio telemetry | motus wildlife tracking system
individual marking | molecular markers | stable isotopes | movement models | future methods
Overview

Painted Bunting with a geolocator.
Solar geolocation has been used for centuries by mariners and explorers. The concept is based on the fact that day length varies with latitude while time of solar noon varies with longitude. Measuring these variables, one is able to determine general position on the globe.
Geolocation dataloggers, also called “geologgers” or “geolocators”, take advantage of this solar principle. However, rather than tracking the exact position of the sun, geolocators use a light sensor to generate and store light-level data at regular intervals. During twilight periods, a simple series of light measurements can deduce the sun’s position based on the correspondence between light intensity and the angle of the sun. Usually a low sun angle is designated as a threshold for determining sunrise and sunset, and solar noon is assumed to occur midway between the two. One can then infer a location based on the length of the day (latitude) and the time of solar noon (longitude). The same calculations can be applied to nocturnal measurements as well, using solar midnight for longitude.
How do they work?
Geolocators record light levels, which must then be processed to obtain location estimates. There are two main methods for analyzing geolocator data, both of which use twilight times and periods.
- Threshold methods: use two successive twilight events (the times at which the recorded light level crosses a predetermined threshold) to produce a location estimate
- Curve-fitting methods: use rate of change in light level during the twilight period to derive a location estimate using a single twilight
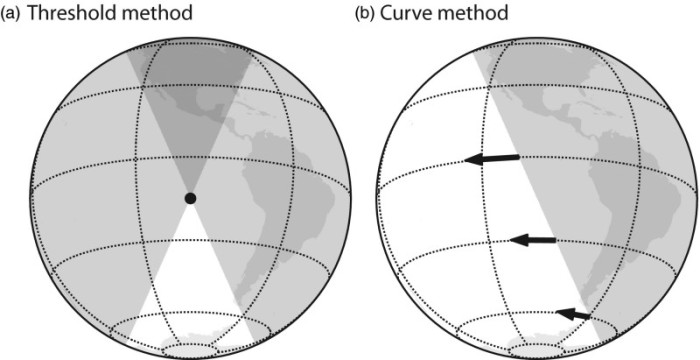
Illustration of two different methods of obtaining location estimates from light levels: (a) Threshold method and (b) Curve method. From Lisovski et al. (2020).
Both of these methods first require twilight annotation, for which there are a number of tools available. The choice of threshold or curve-fitting methods will depend on the study species, research question, tag type, and other variables specific to your study.
A number of open-source analytical tools have recently become available for all steps of geolocator data analysis, from twilight annotation, to calibration, and estimating locations. An online guide is now available to explain the different analysis methods and tools, based on Lisovski et al. (2020).
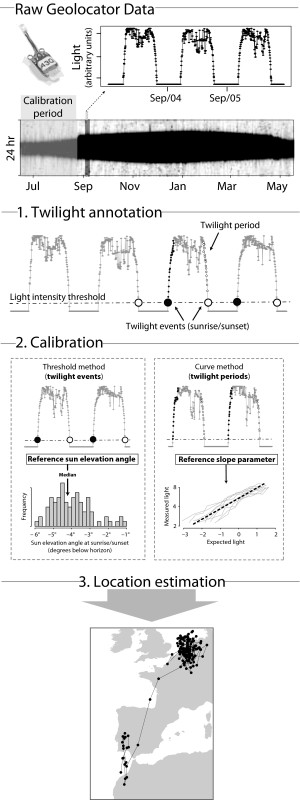
The steps required to obtain location estimates from raw light-level geolocator data. Schematic from Lisovski et al. (2020).
Challenges
At first glance, this method appears to be an elegant solution to the problem of how to track small birds. With a minimal electronic circuit and a small battery, you can generate location data over an entire migration cycle and obtain two data points every day (diurnal and nocturnal points). However, there are many challenges associated with it.
- Tags must be recovered in order to obtain the data
- Error caused by environmental factors (e.g. weather and vegetative cover)
Nevertheless, geolocators are the only practical means of tracking small migratory birds over large distances, and there is great interest in them among the ornithological community. Because of their small weight, they have been used extensively to track small birds which previously could not be studied. Technological advances such as these have led to a “golden age of bio-logging” and new insights into migratory connectivity of many species (McKinnon and Love 2018).
There are two fronts in the pursuit of geolocator tracking: hardware and software. On the hardware front lie the challenges of miniaturization, precision, durability, and operating life. Though effects of geolocators on small songbirds are weak, miniaturization will allow for the use of tags on smaller species and the reduction of relative load on larger species (Brlík et al. 2020).
On the software front there are a variety of approaches to problems, including determining time of sunrise and sunset from continuous light-level data. The simplest software uses a light threshold level to define sunup and sundown and then apply an algorithm that translates day length and solar noon into discrete data points. More sophisticated methods employ template fitting techniques to determine sunup and sundown, and some have incorporated a Bayesian framework that incorporates known data (e.g. expected behavior, landscape features, and previous locations) into location estimates.
Edited by Eli Bridge (University of Oklahoma, ebridge@ou.edu), 2014
Updated by Allison Huysman (Migratory Connectivity Project, huysmana@si.edu), 2020
References
- Brlík, V., J. Koleček, M. Burgess, S. Hahn, D. Humple, M. Krist, J. Ouwehand, E. L. Weiser, P. Adamík, J. A. Alves, D. Arlt, S. Barišić, D. Becker, E. J. Belda, V. Beran, C. Both, S. P. Bravo, M. Briedis, B. Chutný, D. Ćiković, N. W. Cooper, J. S. Costa, V. R. Cueto, T. Emmenegger, K. Fraser, O. Gilg, M. Guerrero, M. T. Hallworth, C. Hewson, F. Jiguet, J. A. Johnson, T. Kelly, D. Kishkinev, M. Leconte, T. Lislevand, S. Lisovski, C. López, K. P. McFarland, P. P. Marra, S. M. Matsuoka, P. Matyjasiak, C. M. Meier, B. Metzger, J. S. Monrós, R. Neumann, A. Newman, R. Norris, T. Pärt, V. Pavel, N. Perlut, M. Piha, J. Reneerkens, C. C. Rimmer, A. Roberto-Charron, C. Scandolara, N. Sokolova, M. Takenaka, D. Tolkmitt, H. van Oosten, A. H. J. Wellbrock, H. Wheeler, J. van der Winden, K. Witte, B. K. Woodworth, and P. Procházka. 2020. Weak effects of geolocators on small birds: A meta-analysis controlled for phylogeny and publication bias. Journal of Animal Ecology 89:207–220.
- Lisovski, S., S. Bauer, M. Briedis, S.C. Davidson, K.L. Dhanjal-Adams, M.T. Hallworth, J. Karagicheva, C.M. Meier, B. Merkel, J. Ouwehand, L. Pedersen, E. Rakhimberdiev, A. Roberto-Charron, N.E. Seavy, M.D. Sumner, C.M. Taylor, S.J. Wotherspoon, and E.S. Bridge. 2020. Light-level geolocator analysis: A user’s guide. Journal of Animal Ecology 89:221-236.
- McKinnon, E.A. and O.P. Love. 2018. Ten years tracking the migration of small landbirds: Lessons learned in the golden age of bio-logging. The Auk 135: 834-856.
HOME | satellite telemetry | acoustic telemetry | geolocators | radio telemetry | motus wildlife tracking system
individual marking | molecular markers | stable isotopes | movement models | future methods